在ICRA2020国际大会上,来自哈佛大学和科罗拉多大学博尔德分校的Kaushik Jayaram、Jennifer Shum、Samantha Castellanos、E. Farrell Helbling和Robert J. Wood共同发布“缩小比例昆虫级微型机器人:HAMR-VI到HAMR-Jr”,表明机器人不仅可以达到速度快体积小,而且还会越来越小!
这个机器人究竟是有多快多小,就请和文摘菌一起看看这个硬币大小的爬虫机器人吧!
能跑能跳,还能横着走
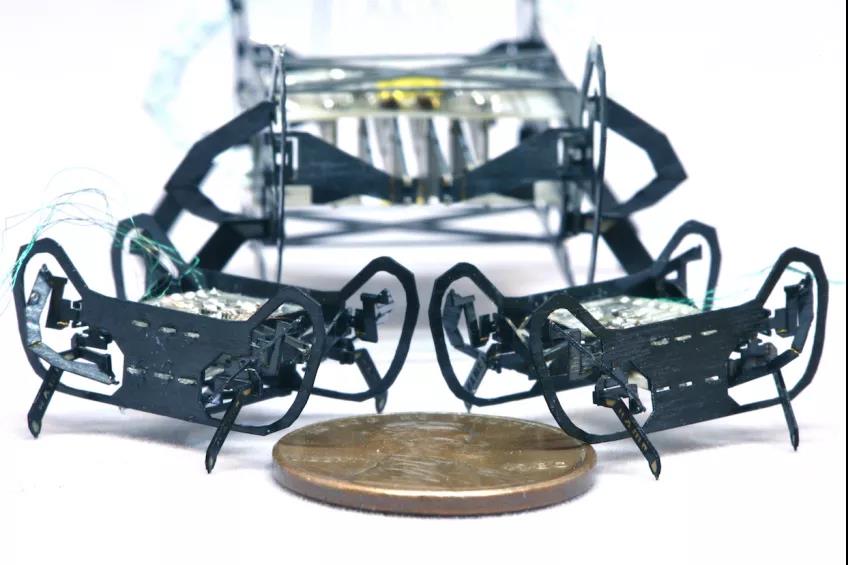
科罗拉多大学博尔德分校/哈佛大学保尔森工程与应用科学学院(SEAS)研发的HAMR-Jr仅硬币大小,是目前最小、最快的昆虫级机器人之一,每秒可爬行约30厘米。
上次探访哈佛移动微型机器人(HAMR)是在2018年,尽管当时就有“微型机器人”的新闻,回到现在,就“昆虫级”机器人看的话,5厘米长3克重的HAMR还是比较大的。
这周在国际机器人自动化大会(ICRA)上,我们看到了HAMR最新版本——HAMR-Jr。它明显更小巧,重量只有蟑螂的十分之一,和蟑螂的小腿一样高。
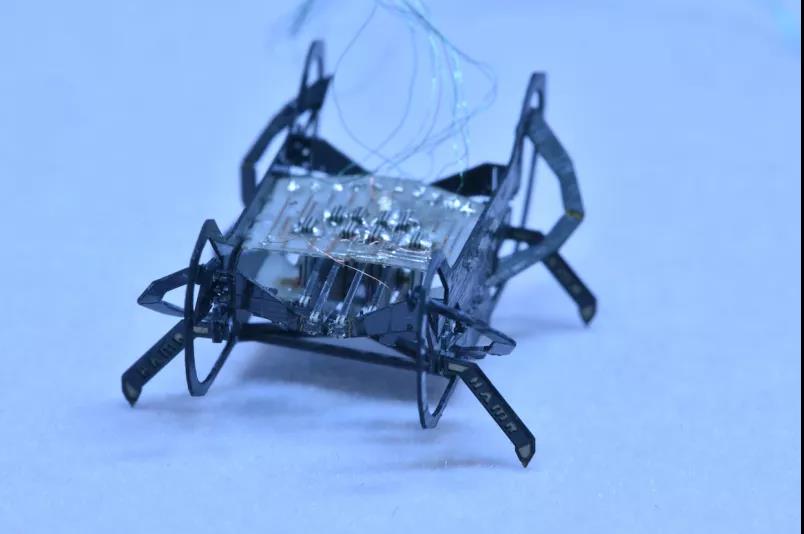
HAMR-Jr即小巧又能干,它体内的压电驱动器,会以每秒合计30厘米驱动其爬行,即大约200Hz步频。
虽然驱动器可以用更快的速度(接近300Hz)工作,但超过200Hz后,机器人实际上会减速,事实已证明200Hz是共振最佳点,可以使机器人的腿部提升和跨步长度两者达到均衡状态。
值得一提的是,200Hz的步频不算慢,即使腿最快的昆虫也无法企及200Hz步频。
澳大利亚的虎甲虫似乎是世界上靠腿爬行最快的昆虫,当它追逐猎物时速度能达到2.5米/秒,步频却只是十几Hz,这个对比数据是根据同等体积大小的最快昆虫(最快的速度是以每秒体长来衡量)。
如果像这样比较的话,那还是加利福尼亚州的一种微小螨虫取胜,每秒前行的速度约为200个体长,因为这种螨虫极其微小(芝麻粒大小),这估计相当于0.25米/秒;但成年螨虫的步频能达到135Hz,与HAMR-Jr(体型更小)的速度差不多。
昆虫步频极限可能是100nhz(微赫兹),当跨过该节点,就需要克服运动神经脉冲和肌肉纤维活性的生物学限制。
昆虫肌肉同步收缩的最高频率绝对值为224hz,比如制造蝉声的澳大利亚蝉的鼓膜肌肉。“同步”一词指神经脉冲和肌肉需要同时工作,但神经脉冲和肌肉也可以异步工作,异步工作所需的积极协同更少,还能规避一些生物学控制极限。
有些昆虫利用对抗性的肌肉非同步机制,能使其身体以极高的频率弯曲,这通常是为给它们的翅膀提供能量。比如吸血蠓运用这种机制:以1046Hz频率拍打翅膀,这种近似神话的高频速度,也会严重地受到翅膀自身的限制,如果剔除大部分翅膀区域后,剩下部分还能按2200Hz的频率拍打。
HAMR-Jr目前能小跑、弹跳、跳跃,还能像螃蟹一样横着走。当它的有效负荷达到其自身重量(320毫克)时,HAMR-Jr仍然稳定发挥,说明它有能力处理包括电池和传感器在内的有效负荷。尽管还想给HAMR-Jr减轻体重,但实验结果表明需要HAMR-Jr的有效负载至少在3.5克。
仅就原始速度而言,较大的HAMR版本同比例缩小造成的最大的性能冲击可能是质量和惯性降低带来的HAMR-Jr重心不稳。解决该问题的一种方法是换双有抓地力的鞋子,还可以调试步频与最大步长。
前所未有的实验
“我们能以超过200Hz的频率驱动HAMR-Jr腿部循环,这个频率在陆地生物系统里几乎前所未有,而且我们没有高步频运动动力学实验的经验。”——Kaushik Jayaram,科罗拉多大学博尔德分校
关于HAMR-Mini, HAMR-Nano, 和HAMR-Atto的研究情况细节,是与科罗拉多大学博尔德分校的机器人和系统设计副教授、文章第一作者Kaushik Jayaram进行交流后得到的,接下来就以Q&A的方式展现这段令人回味深长的研究过程。
Q:当把HAMR-VI缩小到HAMR-Jr时,你遇到过哪些非常棘手的问题?
A:设计和制造过程是最容易的部分,因为我们不需要改变和调试。所以我们最棘手的挑战主要是来自组建。比如:我们正在使用接近商用原材料零件的极限,组装时材料(弹性系数)或几何特性(厚度)或胶水的微小变化都会对机器人性能产生重大影响。另外,处理微小和易碎零件,需要在显微镜下将其组合需要大量的耐心和手指的灵活性。另一件棘手的事情就是确保运动性能,主要是因为200Hz这个频率,我们之前没有尝试过。
Q:机器人所运行的表面会在多大程度上影响它的性能,你能详细说明一下你在论文中提到的潜在“表面附着机制”吗?
A: HAMR-Jr的理想的运行表面应该是平整的,有良好的摩擦力,HAMR-Jr的垂直腿部位移大约1毫米,超过1mm的表面凹凸度对它来说具有挑战。对于更大的表面特性,机器人将需要用“爬”来克服障碍。过去,我们已经展示过消极机制,如像昆虫一样的腿部刺毛或像壁虎一样的粘垫,来增加有效摩擦。我们也展示过积极附着机制,如电附着,它可以通过电调制粘在金属表面,比如喷气发动机的内部,或者在非导电的基底上,比如叶子下面。我们将其作为未来研究方向,正在积极探索与研究中。
Q:开发一个无系绳的机器人需要哪些方面参与?
A:之前我们已经展示过HAMR-VI(HARM-F)的动力和控制,它携带了所有必需的车载电子设备(约1克)和电池(0.33克)。事实上,HAMR-Jr的有效负载容量至少为3.5克。但我们认为电子设备应该可以制造成更小。来自Robert Wood’s lab 的一篇文章显示,约89毫克的电子器件包就能驱动像RoboBee这样的微型执行结构机器人,尝试复现后,我们获得了一个接近HAMR-Jr重量(约320毫克)的电子器件封装包(<400毫克),而不需要其它优化,这令人非常兴奋!
Q:有哪些原因需要让HAMR-Jr变得更小?HAMR能够变到多小?
A:面对现实世界的很多应用,我们希望HAMR-Jr能变得更小、更有能力。具体而言,倒塌建筑的碎石裂缝通常只有几厘米长。与此相似,之前我们与劳斯莱斯合作:在引擎检测任务中,我们发现商用喷气发动机的内窥镜端口直径为8至12毫米。在机器人手术应用中,限制条件甚至更小,因为最大的动脉只有大约8到10毫米,制造同比例机器人也可以利用他们作为验证生物学假说的平台(尤其是关于昆虫运动)。
我希望未来几年能看到适应一立方厘米空间的充分自主(动力和控制)、能力更强的HAMR-Jr版本。
Q:您认为像HAMR-Jr这样的机器人将能用于哪些领域?
A:我认为,未来几年像HAMR-Jr这样的微型机器人能产生积极社会影响的四个主要场景是:搜救(机械灵活性)、高价值资产检查(高度自主性)、环境监测(数量的可扩展性)和药物(尺寸的可扩展性)
超小型机器人行业一直非常具有市场,尤其是在一些人类无法到达的地方,就可以使用机器人完成高难度的工作,希望未来能有更多像HAMR-Jr这样的灵活能干的机器人面世,造福人类!
相关报道
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/hamrjr-is-a-speedy-quadrupedal-robot-the-size-of-a-penny